
MHZ - Racemaster
Die 2 Brüder

Racemaster - Caterpillar

1 Meter - Deep V - ungestuftes Mono

Das Boot ist Qualitativ hochwertig, sauber verarbeitet und unglaublich steif. Der festeste Rumpf in GFK den ich je in den Händen hatte.

Für ein 1m Boot ist der Hintern recht schmal. Hat zwar eine tiefes V aber mit nur 85 mm von Deckoberkante bis Rumpfboden eine zierliches Heck.

Zuerst habe ich die Durchführungen für die Ruderanlenkung aus Alu gedreht. Die Faltenbälge liegen im Boot.

Bei der Gelegenheit habe ich noch schnell einen Wasserauslass gedreht.

Als nächstes habe ich den Motorhalter für den Lehner 1940/9 HiAmp & LK gebaut. Den Motor habe ich dann doch durch einen Lehner 1950/7 LK HiAmp ersetzt. Die 30% mehr Leistung waren mir für ein 1m Boot irgendwie sicherer. An 6S sollte er die erforderliche Leistung für das Boot erbringen können.

Aufgrund der Belüftungslöcher am Lagerschild habe ich mich für eine Variante mit Aufschwinghalter entschieden. So ist mir die Konstruktion stabiler. Aus Alu gedreht und gefräste Halter. Der Motor sitzt in einer Passung und die beiden Schrauben haben Torx-Köpfe. Die Seitenwände sind aus extrem harten 2mm CFK Platten. So eine harte Platte hatte ich noch nie, war nicht leicht, die zu bearbeiten.

Da der Kühlmantel bei abnehmen, durch einen unter dem Mantel befindlichen Aufkleber, Macken an der Eloxalschicht bekommen hat, habe ich ihn kurzerhand poliert.

Stevenrohr geschnitten und gebogen. Mit den Adaptern von MTC für eine saubere Optik und ich hoffe auch für ein sauberes Boot.

Am Stevenrohr habe ich nur wenige mm Spalt gelassen. Vor der Kupplung ist die gewuchtete
Anti -Verliersicherung zu sehen.

Der Wassereinlass ist mit einer 5mm Bohrung recht groß Dimensioniert. Das Bild täuscht etwas, vorne ist der Einlass bündig. Hinten habe ich ca.: 3/10mm überstand gelassen, damit das vorbei strömende Wasser keinen Unterdruck erzeugen kann und den Wasserkreislauf ehr leersaugt als füllt.

Inzwischen habe ich , aus optischen Gründen, eine Lage CFK Gewebe einlaminiert. Und sicherheitshalber eine 2mm CFK Platte in den Heckspiegel geharzt.
Auf dem Bild sieht man den in Höhe und Neigung verstellbaren Stevenrohrhalter, der aus Alu gedreht und gefräst wurde. Mit der Rändelschraube ist der schnell verstellbar, wenn man am PowerTrimm mal Einstellungen vornimmt.
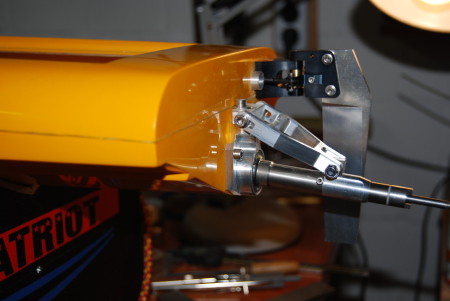
Die Hardware ist von MTC ein PowerTrimm III Eco Vario und das MTC AK Runder gebohrt. Der Antrieb ist neig- und schwenkbar, das Wellenrohr aus VA. Das Ruderblatt ist im Anstellwinkel einstellbar.

Aufgrund des kleinen Hecks der RM fiel die Entscheidung das Ruder neben den Antrieb zu setzen. Ein Ausleger für ein mittiges Ruder wäre mit über 120mm extrem lang gewesen. Das sah werder gut aus noch erweckte das Vertrauen einen so riesigen Ausleger an dem kleinen Heck zu befestigen.

Viel tiefer ging der Antrieb nicht runter.

Der Servohalter ist aus einer einlaminierten Aluplatte erstellt. Ich habe Gewinde eingeschnitten, die sowohl den verwendeten Midi Servo aufnehmen, als auch den Einbau von Standartservos ermöglichen.

Der Motorhalter ist mit mehreren Lagen CFK Gewebeband einlaminiert. Der Regler hat seinen Platz gefunden, wie auch der Schultze Liposaver. ( Noch die Version mit dem 1940/9 Motor ) Auch der Kühlkreislauf steht. Als Sicherung der 4x8mm Schläuche dienen Federstahl- Sicherungsringe.

Ein Antennenröhrchen mit Alusockel und Aluspitze habe ich noch gebaut. Der Empfänger sitzt am Heckspiegel, so das fast die gesammte Antenne aus dem Rumpf ragt.

Ein Aluröhrchen als Gewindeschutz und Distanzstück habe ich noch gedreht. Damit auch die "kleinen " Propeller auf das Wellenstück passen

Da bei der Jungfernfahrt der Spiderman das Boot fast verloren gegangen wäre, da sich der Deckel komplett vom Boot gelöst hatte und in den Tiefen des See gesunken ist, habe ich mir eine Deckelsicherung beastelt. In den Deckel habe ich vorne einen Teller mit einem 3,7mm dicken Stift eingeklebt. In die Vertiefung für den Deckel habe ich ein entsprechendes Loch gebohrt.

Hinten in die Sikke habe ich ein Loch gebohrt und eine Mutter mit Stabilit eingeklebt. Eine Schraube mit M6 Gewinde gedreht und die wird durch einen Gummiring in einer eigestochenen Nut im Deckel gehalten.
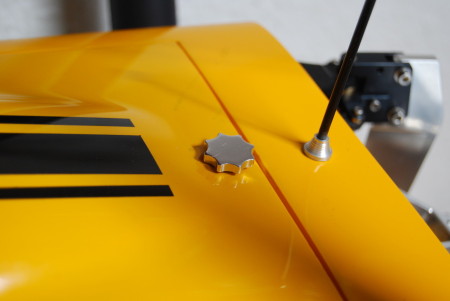
Damit das Ganze auch nach was aussieht, hab ich den Teller meiner Schraube in " Tankdeckel- Optik " gefräßt. Damit ist der Deckel fixiert und wird so ohne weiteres nicht verlohren gehen. Abgeklebt werden muss natürlich noch, damit es dicht ist. Aber das Klebeband braucht den Deckel nicht mehr halten.
Das Boot bekommt, bevor es das erste Mal Wasser gesehen hat, einen radikalen Umbau der gesammten Elektronik.
Die Funke wird auf Multiplex M-Link mit Telemetrieübertragung umgestellt. UniLog und GPS werden ( so denn alles funzt ) alle Daten in Echtzeit auf das Display des Senders Übertragen. Es lassen sich auch Alarmwerte einstellen, so das der Sender Zeichen gibt, wenn die eingestellten Werte unter-/ überschritten werden.
Dann hat ein Schulze fut.-L-24.150 wk Einzug gehalten. Der Seaking passte irgendwie nicht, so wie ich es wollte, ins Boot und das Umlöten der Anschlüsse war ein Disaster. Aber das ist eine andere Geschichte. Der Regler sollte ausreichende Reserve für den Lehner 1950/7 liefern und auch mal kleine Abstimmungsfehler verzeihen.
Dazu kommt ein Powerschalter 60V 120A/240A von Emcotec. Der hatte sich ja schon in der Puffin bewährt und hat zusätzlich noch einen Funkschalter bekommen. So ist es möglich die Akkus per Funke ab -/ zuzuschalten. Dazu ist ein Failsave integriert, das bei abreissen des Funksignals den Strom vom Antriebsstrang trennt. Das sollte dann "Stand der Technik" sein, was die Sicherheit angeht.
Wenn ich das Ganze dann auch noch so programmiert bekomme das alles funzt, wäre das Boot ungemein komfortabel. Alle wichtigen Daten sind in Echtzeit und mit ihren Maxi/ Minimalwerten abzulesen. Also direkt auf dem See, das Boot braucht nicht erst reingeholt und aufgemacht zu werden. Und es braucht keinen Computer um die Daten auszulesen. Sollte ein Propwechsel anstehen, so schaltet man einfach den Powerschalter aus und wechselt den Prop ohne Gefahr, das der Motor anlaufen könnte. Sollte doch mal der Regler durchschalten und das Boot wegfahren wollen, so werden die Akkus einfach abgeschaltet und das Boot steht.
Sollte alles so funzen wie ich mir das denke, wird das Boot nur noch zum Akkuwechseln ( oder wenn was defekt ist) aufgemacht : ))
Wenn alles fertig ist folgen Bilder und der Erfahrungsberich dazu.

Der Powerschalter hat ein Gehäuse bekommen. Der Schulze sitz oben drauf. Schalter und Regler sind direkt miteinander verlötet, damit die Kabelwege so kurz als möglich bleiben.
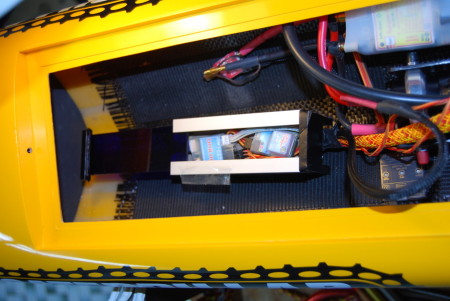
Für die Telemetriegeräte habe ich ein Gehäuse gebaut, in dem auch die überschüssigen Kabellängen untergebracht sind.

Ist zwar schon recht voll in dem schmalen Rumpf, aber noch übersichtlich und einigermaßen aufgeräumt.
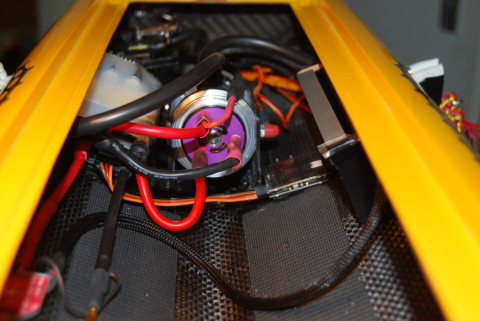
Die Kabel habe ich weitestgehend mit Schutzschläuchen überzogen.

Es fehlt noch der Empfänger und der Empfängerakku. Sobald der Akku eintrifft geht es ans Programmieren der Anlage. Bin gespannt ob alles wie es soll funzt.

Der Empfängerakku hat ein Gehäuse bekommen, einen anständigen Schalter und oben drauf sitzt der Empfänger.

Der Akku sitzt unter dem Empfänger in einem halboffenen Gehäuse, damit er noch einigermaßen zugänglich ist. Das Gehäuse ist mit Klett fixiert. Musste rausnehmbar sein, ich lade ungerne im Boot.

So alles ordentlich vertüddelt und verlegt, eingestellt und ausgerichtet.
Die Anlage ist Programmiert und funzt.
Die Stromzufuhr lässt sich jetzt über einen Schalter am Sender ab und zuschalten. Funzt auch. Vor allem kein Funken beim Anstecken der Akkus, kein unbedachtes Anlaufen des Motors find ich einfach nur gut.
Telemetrie UniLog und GPS wurden Upgedatet, Programmiert und man soll es nicht glauben es funzt. Ich habe alle wichtigen Daten in Echtzeit auf dem Senderdisplay.
Alarm funktion habe ich noch nicht testen können, ansonsten läuft das ganze System so wie gedacht.
Leider zeigt das Display nicht die Max-Min Werte an, sondern wirklich das was grade passiert. Aber dafür hat man ja noch die Auswertmöglichkeit mit LogView, was nun auch das GPS eingebunden hat.



Inzwischen ist das Boot verkauft. Zu viele Boote zu wenig Zeit sie zu fahren und anderer Projekte warten schon.