
BigTeeTracing " Pacer 50 "
Ein 50 inch - 127 cm langes ungestuftes Mono von BigTeeRacing aus UK
In UK wird Offshore Racing wörtlich genommen und es wird dort mit den Modellen auf dem Meer gefahren.
Das Team um den 3 fachen Champion, in der OMRA D-Class, Tony Gilder baut seine erfolgreichen Boote auch für Kunden.
Tony wird mein Boot wohl diese Woche bauen und so hoffe ich, das es Ende Oktober bei mir ankommt.
Es wird ein full Carbon Epoxy Rumpf, der in Vacuumtechnik laminiert wird.
Sobald das Boot bei mir angekommen ist, werde ich Bilder einstellen.
Die Entscheidung für diese Boot habe ich getroffen, da ich ein wirklich Rauhwasser taugliches Boot haben wollte. Und die Video`s auf der Seite von BigTeeRacing belegen diese Eigenschaft sehr Eindrucksvoll.
Ich bin noch nicht sicher, ob das Boot mit 2x Scorpion 4035-800 an je 10S1P oder mit einem Plettenberg 370/BM50 A1 an 10S2P angetrieben wird.
Das Boot ist fertig und versandbereit. Wird aber dieses Jahr nicht mehr ankommen.
Nun ist es angekommen.

Das Boot ist ziemlich genau 50 inch lang = 127 cm. Reine Rumpflänge.

Praktisch frisch aus der Form, ich hab noch nicht mal die Klebestellen von der Verpackung entfernt.

Die Rumpfbreite beträgt 32 cm.
Von der Unterkante des Überhang bis Kiel sind es 9cm.
Der Überhang mist 5cm in der Tiefe.

Duchgehend saubere Laminierarbeit und schöne breite Nahtbänder.


Zum Vergleich, meine 1m lange Racemaster. Das Bild täuscht ein wenig, die Heckspiegel beider Boote sind Bündig.

Es kommt wieder anders als man denkt.
Weder ein Pletti 370, noch sind es die beiden China Al geworden.
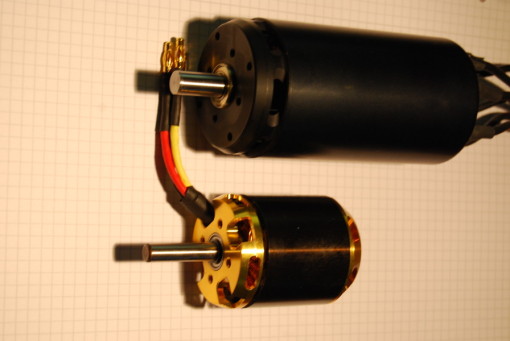
Es ist ein Lehner 3060/14 geworden.
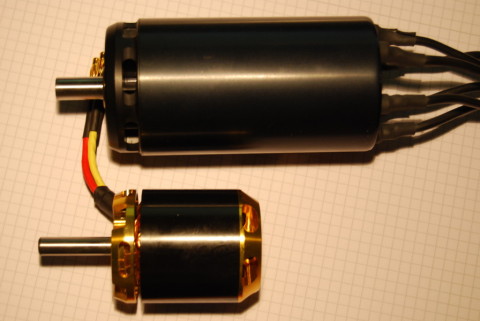
Der Lehner ist schon ordentlich groß. Im Vordergrund liegt, ein auch nicht grade winziger, 4035 Scorpion.
Bei 12S saugt der Motor so mit ca.: 90A an den Zellen.
Es liegen dann etwa 21000 u/min Lastdrehzahl an, bei ca.: 170 Ncm Drehmoment.
Sind rund 3,7 Kw oder rund 5 PS.
Wenn ich ein 14S Setup verwende sind es ca.: 100 A bei 24.000 u/min Lastdrehzahl , mit 188 Ncm Drehmoment und rund 6 PS

Trotz des großen Motors, ist im Innenraum noch reichlich Platz.
Bei der Reglerwahl weiss ich noch nicht genau, was es werden wird. Leider gibt es momentan keine Schulze Regler mehr. Vielleicht wird es der neue Kontronik Kosmik. Aber mal abwarten, was es letztendlich wird.

Die Reglerfrage ist nun auch entschieden. Manchmal bekommt man ein Angebot, was man nicht ablehnen kann. Darum ist es ein YGE 160HV Navy geworden. Den habe ich so unverschänt günstig und wenig gebraucht bekommen, das ich einfach zuschlagen musste.
Leider muss die Cap`s Bank getauscht werden, da es die Kleine von YGE ist und nicht für ein 12S Setup geeignet ist. Werde sie durch ein geeignete Cap`s Bank ersetzten.
Mit Motor und Regler liege ich jetzt weit unter dem Preis, den ein Kosmik Regler neu kostet. Wenn der Regler das kann, was drauf steht, habe ich satte 60% Reserve, was für meine geplanten 80-90 Km/h ausreichen dürfte.
Ich werde das Boot aller Wahrscheinlichkeit nach mit 12S 1P und 10.000 mAh auslegen. Da ich einen Lipowatch von SM Modellbau verwenden möchte, ist es einfacher Lipo`s mit hoher Kapazität zu wählen, da der Lipowatch "nur" 15 Zellen überwachen kann. Eine Kaskadierung von 2 Lipowatch ist mir dann doch zu kompliziert.
Eventuell werde ich den Motor auch noch geringfügig untersetzten. Gute 2-2,5 Nm sollten reichen um ein großen Prop als Rauhwassersetup zu verwirklichen. Mal schauen.
Die CAD Stroy
Da ich momentan eine Werkpause habe, da meine Frässpindel für die CNC Maschine länger zur Reklamation braucht, habe ich mich ein wenig in die Theorie gestürzt. Es macht ja Sinn, das CAD einigermaßen zu beherrschen, wenn man eine CNC Fräse nutzen möchte.
Ich bin kein Freund ermüdender Studien von Bedienhandbücher oder das durchackern wochenlanger Tutorials.
Meist suche ich mir ein Projekt aus und versuche dieses dann zeichnerisch umzusetzten. Try and Error eben : )
In diesem Fall habe ich mir die Pacer vorgenommen.
Vorweg gehend möchte ich sagen, das dieses Projekt unnötig ist. Das kann man alles wesentliche einfacher und billiger bauen. Aber das hier ist Hobby, Spass und unterliegt keinen Anforderungen des "echten" Lebens. So kann ich hier mal frei spinnen ohne Kompromisse.
Es stand von Anfang an fest, das die Pacer etwas besonderes werden soll. Zuerst stand der Antrieb im Vordergrund. Ich wollte einen lenkbaren Antrieb haben. Alles was ich zum Kauf finden konnte, sagte mir nicht zu. Irgend etwas war immer, was mich an den angebotenen Antrieben gestört hat.
Ein Z-Drive kam auch nicht in Frage, da die wenigen angebotenen eine Drehzahlerhöhung beinnhalten, die nicht zu meiner Auslegung passte.
Auf der Suche nach Antriebskonzepten bin ich über ein Französische Firma gestolpert, die allerdings Surfacedrive für echte Schiffe baut. Das Konzept hat mich aber nicht mehr los gelassen und so beruht der Entwurf meines Antriebs auf diesem Konzept. Leider musste ich einige Änderungen/Anpassungen vornehmen, da sich ein Antrieb wie im Original nicht bzw. schwer in ein Modell übertragen lässt. Die Probleme liegen in der Kraftübertragung mittels Kardanwelle bzw. homokinetischer Gelenkwelle.
Das bauen einer solchen Kraftübertragung wäre nicht das größte Problem, aber die Drehzahlen um / über 20.000 u/min. sind zu viel. Die ganze Mimik einigermaßen Gewuchtet zu bekommen übersteigt meine Möglichkeiten bei weitem.
Ich habe an den bisherigen Entwürfen über 4 Monate gearbeitet. Es sind einige 100 Zeinungen entstanden und teils auch wieder verworfen worden.
Alle gezeigten Teile sollten so baubar sein, wenn ich keine Denkfehler gemacht habe. Zumindest in der theoretischen Überlegung und in der Simulation funktioniert jedes Teil.
Jedes Teil hat seine korrekten Maße für das "echte" Modell und ist so, wie es gezeichnet ist auch baubar.
Man verfällt beim CAD gerne mal in einen Zeichenmodus, der zwar recht schön und schlüssig ausschaut, aber im realen Leben nicht baubar ist. Das ist hier nicht der Fall ; )
Alle zugekauften Bauteile haben die Maße des Originalteils. Bei Teilen die ich noch nicht habe, sind die Werksangaben bezüglich der Maße angenommen.
Ob ich dieses komplexe, teure und sehr arbeitsintensive Projekt wirklich umsetzten werde, kann ich jetzt noch nicht sagen.
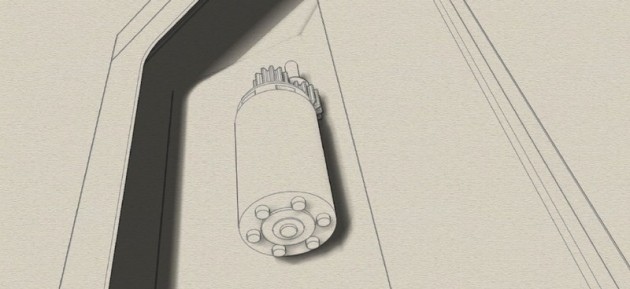
Zuerst habe ich den Motor gezeichnet. Allerdings als Dummy, der Kern z.B. fehlt, da nicht wirklich nötig.
Hier sieht man schon die Idee, die dem ganzen Entwurf zu Grunde liegt. Der Motor soll parallel/horizontal zur Längstachse des Rumpfes liegen. Um dann die Kraft über ein Getriebe zur tiefer liegenden Antriebsachse zu übertragen.
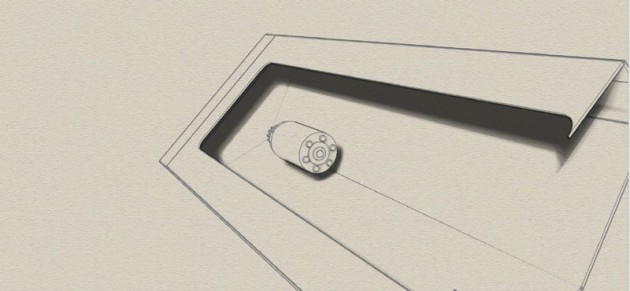
Dann habe ich den Rumpf bis zum Deckelausschnitt abgenommen.(Um die genaue Form bis zur Bugspitze zu zeichen, reichten meine Fähigkeiten mit dem neuen CAD noch nicht.)
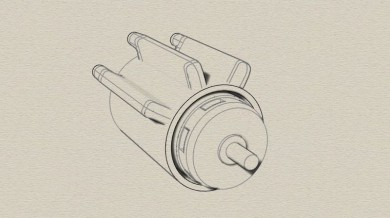
Erster Entwurf eines Kühlmantels. Die Ausrichtung der Gestalltung orientiert sich an der alten Industrie(design) meiner Ruhrpott Heimat.
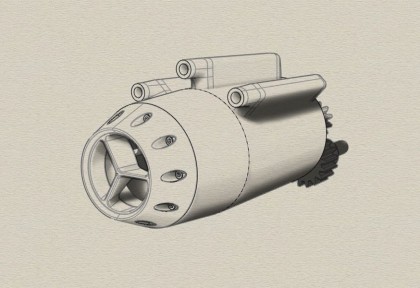
Zwangsbelüftung. Der Motor bekommt einen Lüfter am Backend. Ventilatorkappe und Zwischenstück sind entworfen.
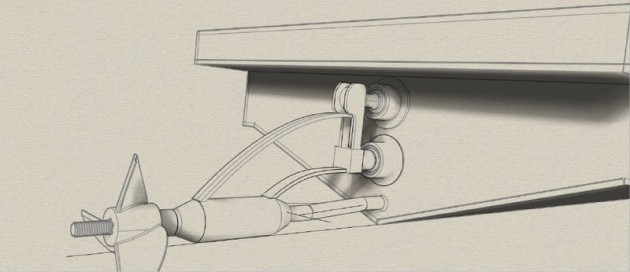
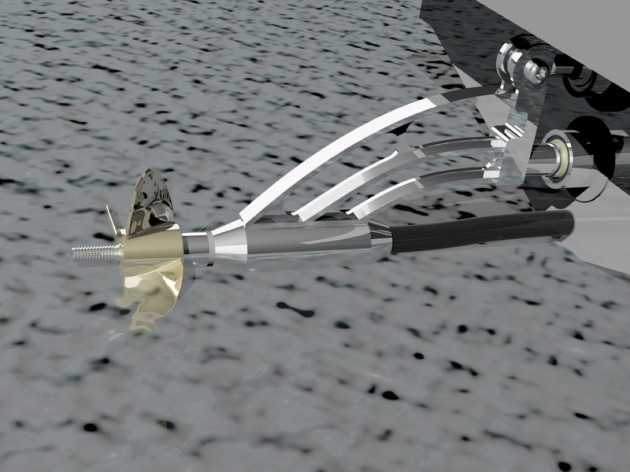
Erster Entwurf des lenkbaren Antriebs. Es gibt 2 Kugelgelenke, die die Drehung ermöglichen und die Kräfte auffangen. Das unter Gelenk ist ein reines passives Stützlager über das der Antrieb schwenkbar ist. Das obere Gelenk ist aktiv, darüber wird der Antrieb gelenkt und geneigt.
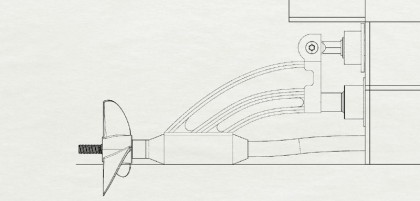
Im Original sitzt im obenren Gelenklager ein Hydraulikzylinder, der den Antrieb im Winkel zum Heckspiegel neigen kann. Das werde ich nicht realisieren, bei meinem Entwurf wird die Neigung nur per Mutter einstellbar sein und nicht während der Fahrt.
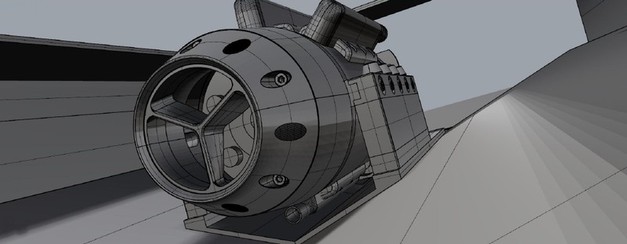
Ah das Rendern funktioniert auch und so sieht das schon mal ganz schick aus.
Das Übersetzten der Motorkraft mittels Zahnrädern war nicht so das, was mir vorschwebte. So bin ich zu einem Zahnriemenantrieb gewechselt. War gar nicht so einfach die passende Paarung aus Zahnrädern und lieferbaren Riemenlängen zu bekommen. Aber mit Stundenlanger rechnerei habe ich dann das Passende gefunden. Ich habe im Moment eine 1:1 Übersetzung gewählt.
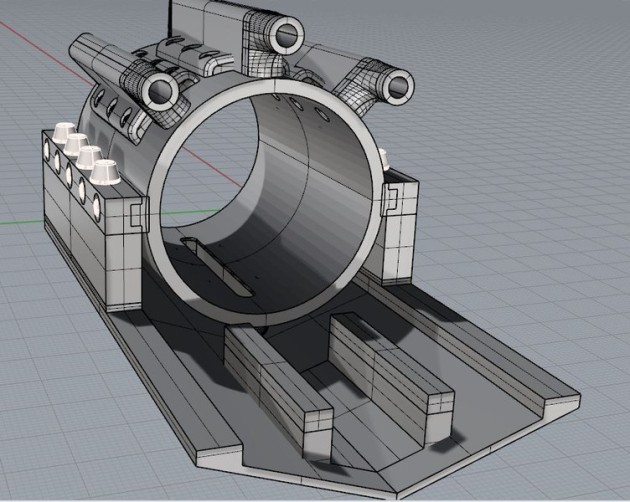
Als Basis der Motorbefestigung und genau fluchtende Basis der Antriebswelle, wird eine Grundplatte gefräst. Somit habe ich fixe, planparallele Flächen zur Achsausrichtung. Die Rückseite der Grundplatte wird dem Rumpfwinkel entsprechend ausgefräst und mit dem Rumpfboden verklebt.

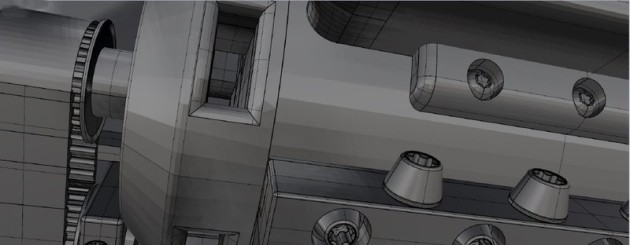
Zusammenspiel von lenkbarem Antrieb und Motor/Getriebeeinheit. Hier sieht man auch, das ich die "Kupplung" für die Flexwelle direkt in die Antriebswelle integriert habe.
Der Entwurf eines Getriebedeckels und der Wasserzufuhr. Das mit dem Rendern klappt auch schon besser.

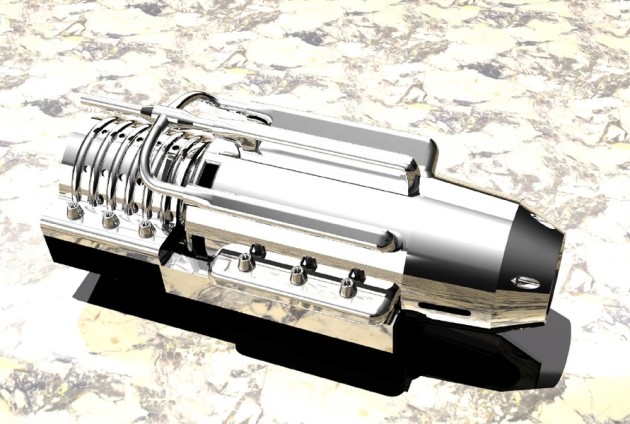
Kühlmantel und Wasserzufuhr erneut überarbeitet, so das es auch baubar ist und eventuell dicht : )
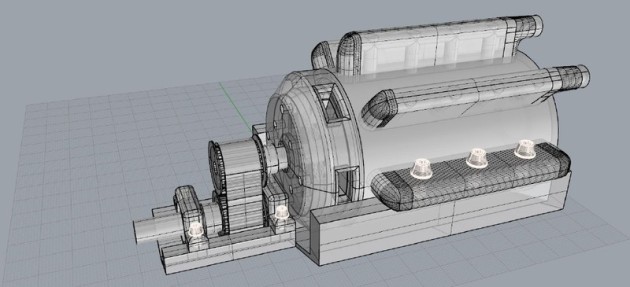
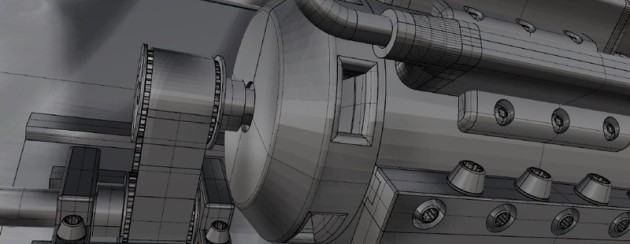
Und weiter bearbeitet, mit Außlass und der entgültigen Aufhängung. Diese Art der Aufhängung ermöglicht es den Riemen nachzuspannen, bzw. bei anderen Übersetzungen den Riemen zu spannen. Ferner kann man so den Motor aus der Aufnahme nehmen ohne ihn beim Einbau wieder ausrichten zu müssen.
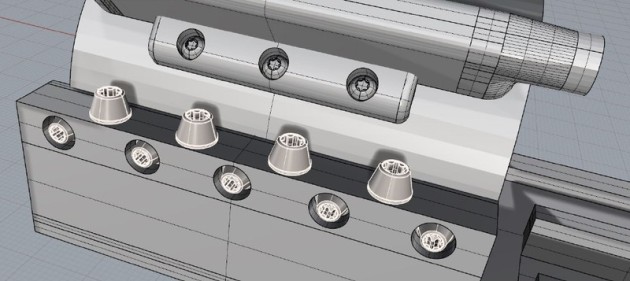
So lässt sich der Motor also über die Nuten aus dem Rahmen schieben oder die ganze Motoreinheit nach oben abheben, je nach dem was für Wartungsarbeiten anliegen. Ob es so viele Schrauben sein müssen ? Nö ginge auch mit weniger, aber so sieht das einfach verschärfter aus : ))
Mit ein paar netten Bildern beende ich den ersten Teil der Story.
Fortsetzung folgt ...........hier