
BigTeeRacing "Pacer50" Teil 2
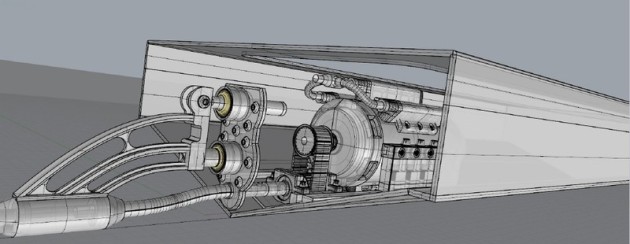
Zwischenzeitlich habe ich das hintere Lagerschild des Antriebs entworfen.

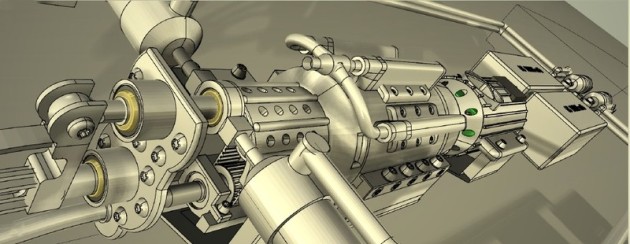
Nun komme ich zum eigentlich Besonderen des lenkbaren Antriebs. Die Anlenkung erfogt im Inneren des Rumpfes. Und das, wie im Original mit Hydraulikzylindern.
Angedacht ist, die Anlenkung mit 2 doppel wirkenden Hydraulikzylindern zu realisieren.
Im Modell sind die Größenverhältnisse aber umgekert zum Original. Die Hydraulikzylinder sind beim echten Antrieb im Verhältniss sehr klein, das geht im Modell nicht. Um die angenommenen Kräfte, die auf den Antrieb wirken können abzufangen, habe ich die Zylinder recht kräftig ausgelegt.
Ein 3 Gelenklager befindet sich in der Aufnahme zuwischen den beiden Druckzylindern. So kann die Drehbewegung realsiert werden. Es ist als 2 Kreis System ausgelegt, so das auch wenn ein Zylinder-Kreis ausfällt, das Boot immer noch steuerbar sein wird.
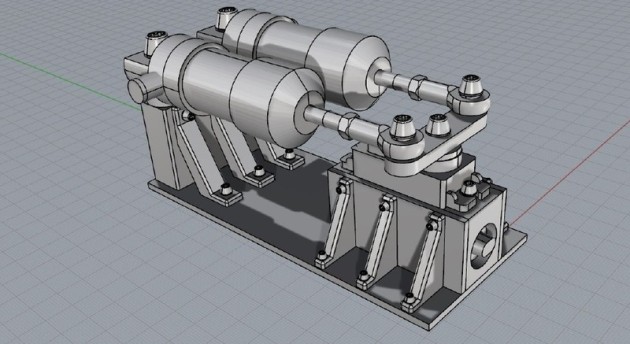
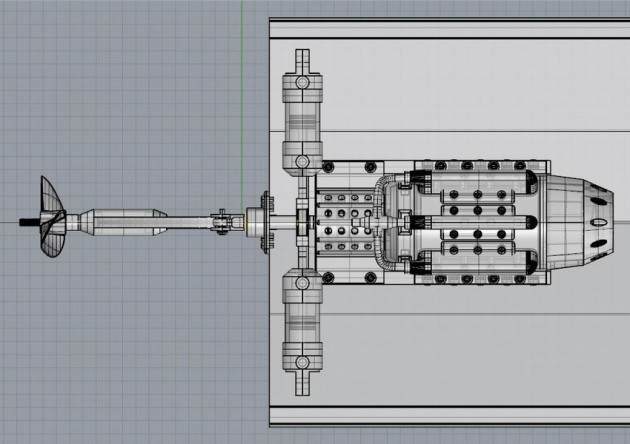
Die Geberzylinder. Ich habe eine 1:1 Übersetzung gewählt. Der Servo wird so an die 30-40 Kg Zug- und Druckkraft entwickeln, so das genügend Power vorhanden sein sollte um den Antrieb ohne Probleme schwenken zu können. Augelegt ist das System um den Antrieb um ca.: 15° schwenken zu können.
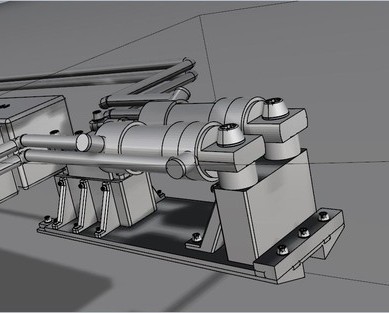
Die Geberzylindereinheit mit dem Servo wird auf einer Platte verschraubt. Diese Grundplatte wird auf einer Trägerplatte verschraubt, welche die V-Form des Rumpfes hat und verklebt wird. So kann man die Gebereinheit jederzeit ausbauen.
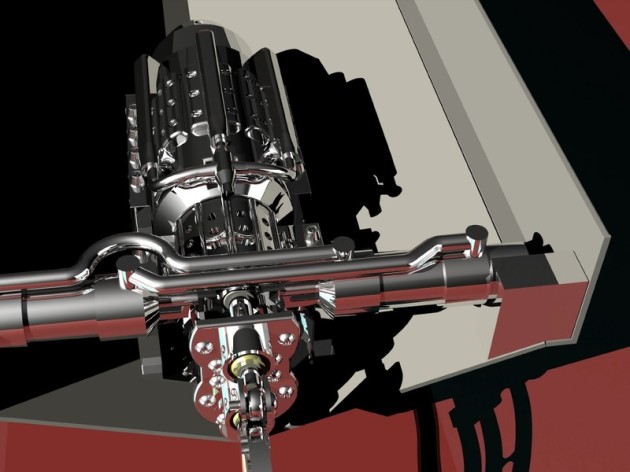
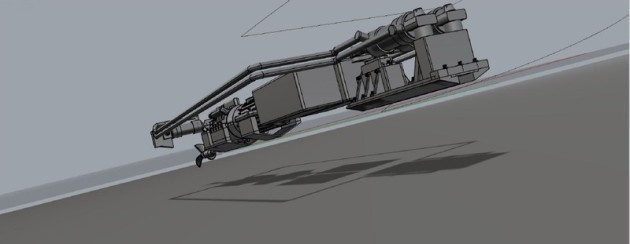
Mit etwas Übung gelingen einigermaßen fotorealistische Bilder. Leider kann ich das Bild nicht in voller Auflösung einstellen.

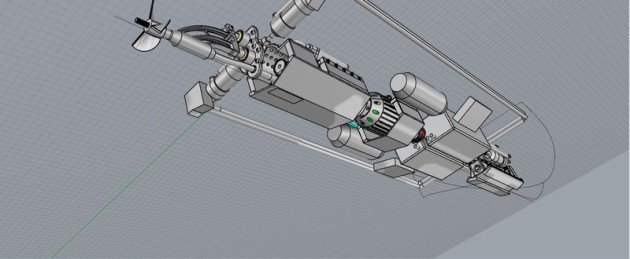
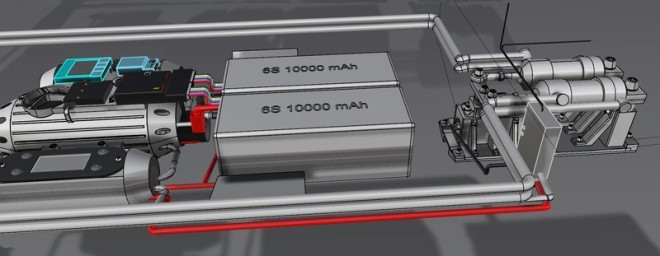
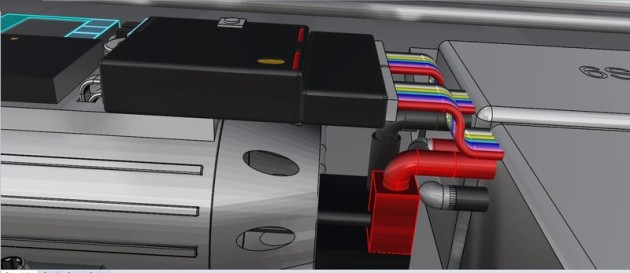
Nun ging ich daran die Reglereinheit für den Motor zu gestallten. In das Gehäuse sind der Powerschalter, der Regler, Anschlussterminal für die Akkus, Anschussterminal für den Motor und der Lipowatch integriert.
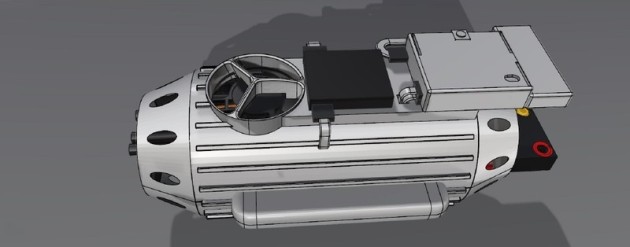
Das Gehäuse wird mit einem Ventialtor, zusätzlich zur Wasserkühlung, gekühlt. Das schwarze Kästchen ist die Fernsteuereinheit um den Powerschalter mit der Fernsteuerung ein/ aus zu schalten. Somit ist gewährt, das ich zu jeder Zeit den Stromfluss vom Antriebsakku zum Motor abschalten / einschalten kann, ohne das Boot zu öffnen.
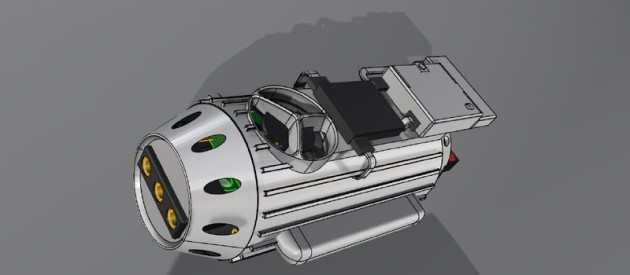
Vorne ist das Anschussterminal zum Motor zu sehen.
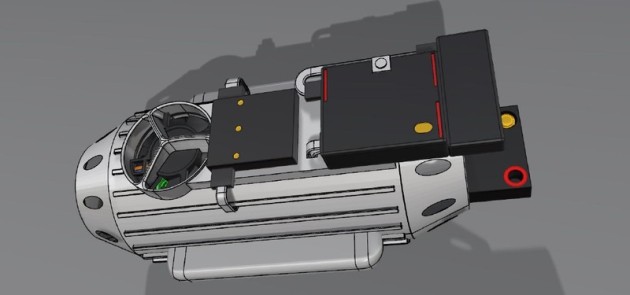
Der Lipowatch ist mit einem Adapter ausgerüstet um 2x6 S anzuschließen. Hinten sieht man das Terminal zum Anschließen der Akkus.

Das Stromregel - und Überwachungsmodul wird genau so auf einer Grundplatte verbaut, wie die Motor/Getriebeeinheit. So kann ich dieses Modul einfach komplett aus dem Boot nehmen.

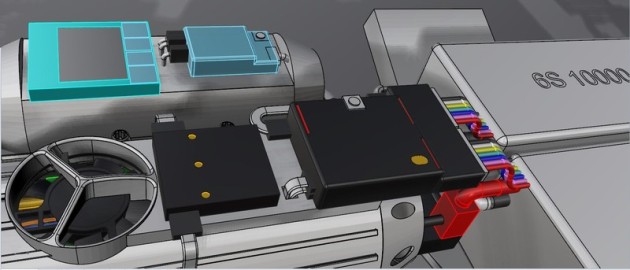
Nun folgten die Terminals für die Stromversorgung des Empfängers und das Telemetrie-Modul.
Im ( hier unteren) Modul befindet sich eine Schalter-Regler-und Überwachungseinheit von Emcotec. Damit wird der Strom für den Empfänger eingeschaltet, auf 7,4 Volt konstant geregelt und überwacht. So lassen sich die Belastungen auf den Servo genau ermitteln, Fehler erkennen, und natürlich der Zustand des Empfängerakkus sofort sehen. Ich habe 1 oder 2 Akkus Lipo 2S 3000mAh geplant. Die Schaltereinheit kann 2 Akkus verwalten.
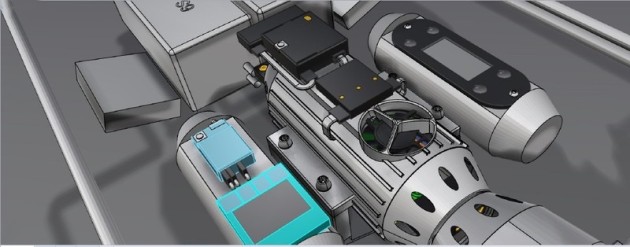
Im 2 Modul habe ich die Telemetrie und Datenaufzeichnung unter gebracht. Dies beinhaltet einen Unilog und das Uni-Display. Sowie die Kabel der Sensoren für Strom, Drehzahl, 2x Temperatur und den Anschluss des GPS Moduls, welche aber im Deckel des Bootes platz finden wird. Der Deckel ist aus Glasfaser, das Boot ja aus Kohlefaser. Das Uni-Display kann für den Lipowatch und das Unilog benutzt werden. Zum auslesen der Daten vor Ort und zur Einstellung.
Alle grundlegenden Dinge stehen fest. Es werden noch pö à pö weitere Details folgen. Wie Wasserzufuhr, Verkabelung, Empfänger, Antennen, Deckelrahmen, Deckelschließung uvm.
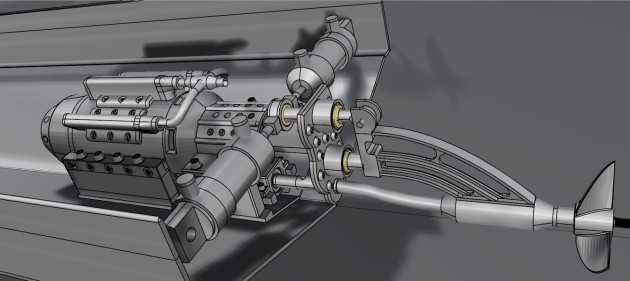
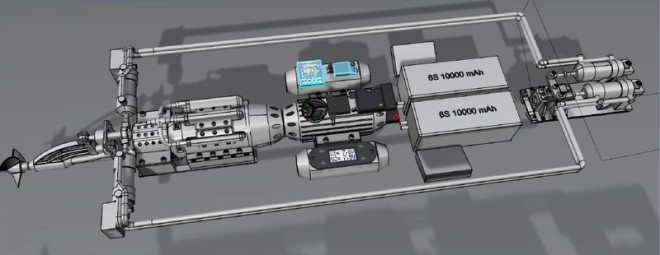
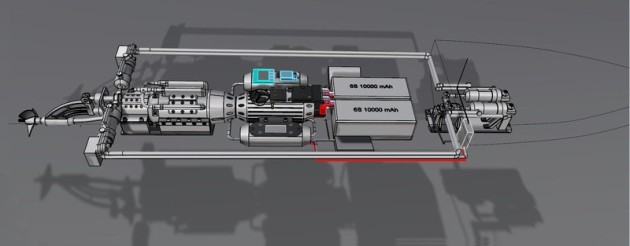
Mit einigen Bildern schließe ich den 2 Teil der CAD Story.
Das elektrische System ist soweit fertig eingezeichnet. Eventuell kommt nur noch eine Wasserpumpe dazu.
Ganz rechts steht der Empfänger, ich möchte die 2 Antennen nach Außen legen, eine Horizontal in Langsachse und eine Vertikal.
Ich meine, ich hätte nichts bei der Verkabelung vergessen oder übersehen.
Alle Kabel die in die Module gehen werden Stecker bekommen, zur besseren Handhabung. Werde mich mal auf die Suche nach anständigen Steckern machen, aber das hat ja noch etwas Zeit ; )
Als nächstes folgen die Kühlkreise.
Fortsetzung folgt ...........